이 강의는 측정에 대한 두 가지 동등한 수학적 설명으로 시작합니다.
일반 측정은 각 측정 결과에 대응하는 행렬들의 모음 으로 설명할 수 있으며, 이는 사영 측정 설명을 일반화한 것입니다.
일반 측정은 출력이 항상 고전 상태(대각 밀도 행렬로 표현)인 채널 로 설명할 수 있습니다.
여기서는 가능한 결과의 수가 유한한 측정에 집중합니다.
결과가 무한히 많은 측정도 정의할 수 있지만, 계산 및 정보 처리의 맥락에서는 훨씬 드물게 등장하며, 이를 엄밀하게 형식화하려면 추가적인 수학(즉, 측도론)이 필요합니다.
처음에는 소위 파괴적 측정에 집중합니다. 파괴적 측정에서 측정의 출력은 고전적인 측정 결과만이며, 측정된 시스템의 측정 후 양자 상태에 대한 명시는 없습니다.
직관적으로 말하면, 이러한 측정은 양자 시스템 자체를 파괴하거나, 측정이 이루어지자마자 시스템이 즉시 폐기된다고 상상할 수 있습니다.
강의 후반부에서는 시야를 넓혀 비파괴적 측정을 고려할 것인데, 여기서는 고전적인 측정 결과와 측정된 시스템의 측정 후 양자 상태가 모두 존재합니다.
행렬들의 모음으로서의 측정
X \mathsf{X} X X \mathsf{X} X n n n { 0 , … , n − 1 } \{0,\ldots, n-1\} { 0 , … , n − 1 } X \mathsf{X} X n × n n\times n n × n X \mathsf{X} X n n n X \mathsf{X} X m m m 0 , … , m − 1 0,\ldots,m-1 0 , … , m − 1
이 명칭은 단순함을 위해 사용한 것입니다.
이후에 나오는 모든 내용을 다른 유한한 고전 상태 집합과 측정 결과 집합으로 일반화하고 원하는 대로 이름을 바꾸는 것은 간단합니다.
사영 측정
사영 측정 은 항등 행렬로 합산되는 사영 행렬들의 모음 으로 설명된다는 것을 상기해 봅시다.
기호로 나타내면,
{ Π 0 , … , Π m − 1 } \{\Pi_0,\ldots,\Pi_{m-1}\} { Π 0 , … , Π m − 1 } 는 각 Π a \Pi_a Π a n × n n\times n n × n X \mathsf{X} X
Π 0 + ⋯ + Π m − 1 = I X \Pi_0 + \cdots + \Pi_{m-1} = \mathbb{I}_{\mathsf{X}} Π 0 + ⋯ + Π m − 1 = I X 어떤 양자 상태 벡터 ∣ ψ ⟩ \vert\psi\rangle ∣ ψ ⟩ X \mathsf{X} X a a a ∥ Π a ∣ ψ ⟩ ∥ 2 \|\Pi_a\vert\psi\rangle\|^2 ∥ Π a ∣ ψ ⟩ ∥ 2 X \mathsf{X} X Π a ∣ ψ ⟩ \Pi_a\vert\psi\rangle Π a ∣ ψ ⟩
X \mathsf{X} X ∣ ψ ⟩ \vert\psi\rangle ∣ ψ ⟩ ρ \rho ρ a a a Tr ( Π a ρ ) \operatorname{Tr}(\Pi_a \rho) Tr ( Π a ρ )
ρ = ∣ ψ ⟩ ⟨ ψ ∣ \rho = \vert \psi\rangle\langle\psi\vert ρ = ∣ ψ ⟩ ⟨ ψ ∣
Tr ( Π a ρ ) = Tr ( Π a ∣ ψ ⟩ ⟨ ψ ∣ ) = ⟨ ψ ∣ Π a ∣ ψ ⟩ = ⟨ ψ ∣ Π a Π a ∣ ψ ⟩ = ∥ Π a ∣ ψ ⟩ ∥ 2 . \operatorname{Tr}(\Pi_a \rho)
= \operatorname{Tr}(\Pi_a \vert \psi\rangle\langle\psi \vert)
= \langle \psi \vert \Pi_a \vert \psi \rangle
= \langle \psi \vert \Pi_a \Pi_a \vert \psi \rangle
= \|\Pi_a\vert\psi\rangle\|^2. Tr ( Π a ρ ) = Tr ( Π a ∣ ψ ⟩ ⟨ ψ ∣ ) = ⟨ ψ ∣ Π a ∣ ψ ⟩ = ⟨ ψ ∣ Π a Π a ∣ ψ ⟩ = ∥ Π a ∣ ψ ⟩ ∥ 2 . 여기서 두 번째 등호에는 대각합의 순환 성질을 사용하고, 세 번째 등호에는 각 Π a \Pi_a Π a Π a 2 = Π a \Pi_a^2 = \Pi_a Π a 2 = Π a
일반적으로 ρ \rho ρ
ρ = ∑ k = 0 N − 1 p k ∣ ψ k ⟩ ⟨ ψ k ∣ \rho = \sum_{k = 0}^{N-1} p_k \vert \psi_k\rangle\langle \psi_k \vert ρ = k = 0 ∑ N − 1 p k ∣ ψ k ⟩ ⟨ ψ k ∣ 으로 순수 상태들로 표현될 때, 이 표현이 ρ \rho ρ Tr ( Π a ρ ) \operatorname{Tr}(\Pi_a \rho) Tr ( Π a ρ ) a a a
Tr ( Π a ρ ) = ∑ k = 0 N − 1 p k Tr ( Π a ∣ ψ k ⟩ ⟨ ψ k ∣ ) = ∑ k = 0 N − 1 p k ∥ Π a ∣ ψ k ⟩ ∥ 2 \operatorname{Tr}(\Pi_a \rho)
= \sum_{k = 0}^{N-1} p_k \operatorname{Tr}(\Pi_a \vert \psi_k\rangle\langle\psi_k\vert)
= \sum_{k = 0}^{N-1} p_k \|\Pi_a\vert\psi_k\rangle\|^2 Tr ( Π a ρ ) = k = 0 ∑ N − 1 p k Tr ( Π a ∣ ψ k ⟩ ⟨ ψ k ∣ ) = k = 0 ∑ N − 1 p k ∥ Π a ∣ ψ k ⟩ ∥ 2 일반 측정
일반 측정에 대한 수학적 설명은 사영 측정의 정의를 완화하여 얻습니다.
구체적으로, 측정을 설명하는 모음의 행렬들이 사영 행렬이 아닌 임의의 양의 준정부호 행렬이어도 됩니다.
(사영 행렬은 항상 양의 준정부호입니다. 또한 고유값이 모두 0 또는 1인 양의 준정부호 행렬로 정의할 수도 있습니다.)
특히, 결과가 0 , … , m − 1 0,\ldots,m-1 0 , … , m − 1 X \mathsf{X} X X \mathsf{X} X { P 0 , … , P m − 1 } \{P_0,\ldots,P_{m-1}\} { P 0 , … , P m − 1 }
P 0 + ⋯ + P m − 1 = I X . P_0 + \cdots + P_{m-1} = \mathbb{I}_{\mathsf{X}}. P 0 + ⋯ + P m − 1 = I X . 시스템 X \mathsf{X} X ρ \rho ρ a ∈ { 0 , … , m − 1 } a\in\{0,\ldots,m-1\} a ∈ { 0 , … , m − 1 } Tr ( P a ρ ) \operatorname{Tr}(P_a \rho) Tr ( P a ρ )
당연히 요구되는 바와 같이, 결과 확률 벡터
( Tr ( P 0 ρ ) , … , Tr ( P m − 1 ρ ) ) \bigl(\operatorname{Tr}(P_0 \rho),\ldots,\operatorname{Tr}(P_{m-1} \rho)\bigr) ( Tr ( P 0 ρ ) , … , Tr ( P m − 1 ρ ) ) 는 어떤 밀도 행렬 ρ \rho ρ
두 양의 준정부호 행렬의 곱의 대각합은 항상 음이 아니라는 사실 덕분에 각 값 Tr ( P a ρ ) \operatorname{Tr}(P_a \rho) Tr ( P a ρ )
Q , R ≥ 0 ⇒ Tr ( Q R ) ≥ 0. Q, R \geq 0 \; \Rightarrow \: \operatorname{Tr}(QR) \geq 0. Q , R ≥ 0 ⇒ Tr ( QR ) ≥ 0. 이 사실을 논증하는 한 가지 방법은 Q Q Q R R R Q R QR QR
조건 P 0 + ⋯ + P m − 1 = I X P_0 + \cdots + P_{m-1} = \mathbb{I}_{\mathsf{X}} P 0 + ⋯ + P m − 1 = I X 1 1 1
∑ a = 0 m − 1 Tr ( P a ρ ) = Tr ( ∑ a = 0 m − 1 P a ρ ) = Tr ( I ρ ) = Tr ( ρ ) = 1 \sum_{a = 0}^{m-1} \operatorname{Tr}(P_a \rho)
= \operatorname{Tr}\Biggl(\sum_{a = 0}^{m-1} P_a \rho\Biggr)
= \operatorname{Tr}(\mathbb{I}\rho) = \operatorname{Tr}(\rho) = 1 a = 0 ∑ m − 1 Tr ( P a ρ ) = Tr ( a = 0 ∑ m − 1 P a ρ ) = Tr ( I ρ ) = Tr ( ρ ) = 1
예시 1: 임의의 사영 측정
사영 행렬은 항상 양의 준정부호이므로 모든 사영 측정은 일반 측정의 예입니다.
예를 들어, Qubit의 표준 기저 측정은 다음과 같은 { P 0 , P 1 } \{P_0,P_1\} { P 0 , P 1 }
P 0 = ∣ 0 ⟩ ⟨ 0 ∣ = ( 1 0 0 0 ) and P 1 = ∣ 1 ⟩ ⟨ 1 ∣ = ( 0 0 0 1 ) . P_0 = \vert 0\rangle\langle 0\vert =
\begin{pmatrix}
1 & 0 \\ 0 & 0
\end{pmatrix}
\quad\text{and}\quad
P_1 = \vert 1\rangle\langle 1\vert =
\begin{pmatrix}
0 & 0 \\ 0 & 1
\end{pmatrix}. P 0 = ∣0 ⟩ ⟨ 0∣ = ( 1 0 0 0 ) and P 1 = ∣1 ⟩ ⟨ 1∣ = ( 0 0 0 1 ) . 상태 ρ \rho ρ
Prob ( outcome = 0 ) = Tr ( P 0 ρ ) = Tr ( ∣ 0 ⟩ ⟨ 0 ∣ ρ ) = ⟨ 0 ∣ ρ ∣ 0 ⟩ Prob ( outcome = 1 ) = Tr ( P 1 ρ ) = Tr ( ∣ 1 ⟩ ⟨ 1 ∣ ρ ) = ⟨ 1 ∣ ρ ∣ 1 ⟩ \begin{aligned}
\operatorname{Prob}(\text{outcome} = 0)
& = \operatorname{Tr}(P_0 \rho) =
\operatorname{Tr}\bigl(\vert 0\rangle\langle 0\vert \rho\bigr) =
\langle 0\vert \rho \vert 0 \rangle \\[1mm]
\operatorname{Prob}(\text{outcome} = 1)
& = \operatorname{Tr}(P_1 \rho) =
\operatorname{Tr}\bigl(\vert 1\rangle\langle 1\vert\rho\bigr) =
\langle 1 \vert \rho \vert 1 \rangle
\end{aligned} Prob ( outcome = 0 ) Prob ( outcome = 1 ) = Tr ( P 0 ρ ) = Tr ( ∣0 ⟩ ⟨ 0∣ ρ ) = ⟨ 0∣ ρ ∣0 ⟩ = Tr ( P 1 ρ ) = Tr ( ∣1 ⟩ ⟨ 1∣ ρ ) = ⟨ 1∣ ρ ∣1 ⟩ 예시 2: 비사영 qubit 측정
X \mathsf{X} X
P 0 = ( 2 3 1 3 1 3 1 3 ) P 1 = ( 1 3 − 1 3 − 1 3 2 3 ) P_0 =
\begin{pmatrix}
\frac{2}{3} & \frac{1}{3}\\[2mm]
\frac{1}{3} & \frac{1}{3}
\end{pmatrix}
\qquad
P_1 =
\begin{pmatrix}
\frac{1}{3} & -\frac{1}{3}\\[2mm]
-\frac{1}{3} & \frac{2}{3}
\end{pmatrix} P 0 = ( 3 2 3 1 3 1 3 1 ) P 1 = ( 3 1 − 3 1 − 3 1 3 2 ) 이 둘은 모두 양의 준정부호 행렬입니다. 에르미트 행렬이며, 두 경우 모두 고유값이 1 / 2 ± 5 / 6 1/2 \pm \sqrt{5}/6 1/2 ± 5 /6 P 0 + P 1 = I P_0 + P_1 = \mathbb{I} P 0 + P 1 = I { P 0 , P 1 } \{P_0,P_1\} { P 0 , P 1 }
X \mathsf{X} X ρ \rho ρ 0 0 0 Tr ( P 0 ρ ) \operatorname{Tr}(P_0 \rho) Tr ( P 0 ρ ) 1 1 1 Tr ( P 1 ρ ) \operatorname{Tr}(P_1 \rho) Tr ( P 1 ρ ) ρ = ∣ + ⟩ ⟨ + ∣ \rho = \vert + \rangle \langle + \vert ρ = ∣ + ⟩ ⟨ + ∣ 0 0 0 1 1 1
Tr ( P 0 ρ ) = Tr ( ( 2 3 1 3 1 3 1 3 ) ( 1 2 1 2 1 2 1 2 ) ) = ( 2 3 ⋅ 1 2 + 1 3 ⋅ 1 2 ) + ( 1 3 ⋅ 1 2 + 1 3 ⋅ 1 2 ) = 1 2 + 1 3 = 5 6 Tr ( P 1 ρ ) = Tr ( ( 1 3 − 1 3 − 1 3 2 3 ) ( 1 2 1 2 1 2 1 2 ) ) = ( 1 3 ⋅ 1 2 − 1 3 ⋅ 1 2 ) + ( − 1 3 ⋅ 1 2 + 2 3 ⋅ 1 2 ) = 0 + 1 6 = 1 6 \begin{aligned}
\operatorname{Tr}(P_0 \rho)
& = \operatorname{Tr}\left(
\begin{pmatrix}
\frac{2}{3} & \frac{1}{3}\\[2mm]
\frac{1}{3} & \frac{1}{3}
\end{pmatrix}
\begin{pmatrix}
\frac{1}{2} & \frac{1}{2}\\[2mm]
\frac{1}{2} & \frac{1}{2}
\end{pmatrix}
\right)\\[4mm]
& = \biggl(\frac{2}{3} \cdot \frac{1}{2} + \frac{1}{3} \cdot \frac{1}{2}\biggr)
+ \biggl(\frac{1}{3}\cdot\frac{1}{2} + \frac{1}{3}\cdot\frac{1}{2}\biggr)\\
& = \frac{1}{2} + \frac{1}{3} = \frac{5}{6}\\[4mm]
\operatorname{Tr}(P_1 \rho)
& = \operatorname{Tr}\left(
\begin{pmatrix}
\frac{1}{3} & -\frac{1}{3}\\[2mm]
-\frac{1}{3} & \frac{2}{3}
\end{pmatrix}
\begin{pmatrix}
\frac{1}{2} & \frac{1}{2}\\[2mm]
\frac{1}{2} & \frac{1}{2}
\end{pmatrix}
\right)\\[4mm]
& = \biggl(\frac{1}{3} \cdot \frac{1}{2} - \frac{1}{3} \cdot \frac{1}{2}\biggr)
+ \biggl(-\frac{1}{3}\cdot\frac{1}{2} + \frac{2}{3}\cdot\frac{1}{2}\biggr)\\
& = 0 + \frac{1}{6} = \frac{1}{6}
\end{aligned} Tr ( P 0 ρ ) Tr ( P 1 ρ ) = Tr ( ( 3 2 3 1 3 1 3 1 ) ( 2 1 2 1 2 1 2 1 ) ) = ( 3 2 ⋅ 2 1 + 3 1 ⋅ 2 1 ) + ( 3 1 ⋅ 2 1 + 3 1 ⋅ 2 1 ) = 2 1 + 3 1 = 6 5 = Tr ( ( 3 1 − 3 1 − 3 1 3 2 ) ( 2 1 2 1 2 1 2 1 ) ) = ( 3 1 ⋅ 2 1 − 3 1 ⋅ 2 1 ) + ( − 3 1 ⋅ 2 1 + 3 2 ⋅ 2 1 ) = 0 + 6 1 = 6 1 예시 3: 사면체 측정
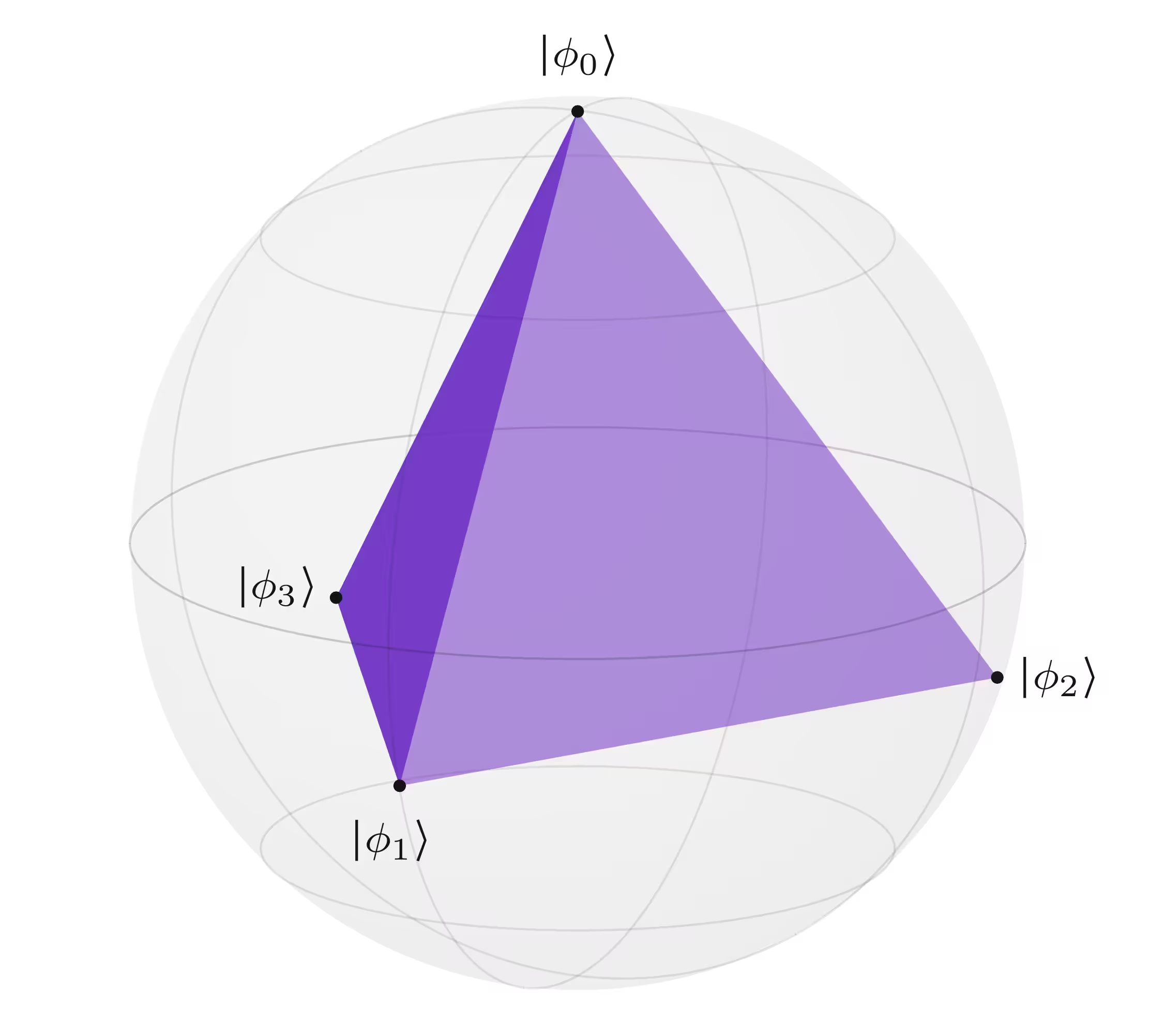
단일 qubit 양자 상태 벡터 네 개를 다음과 같이 정의합니다.
∣ ϕ 0 ⟩ = ∣ 0 ⟩ ∣ ϕ 1 ⟩ = 1 3 ∣ 0 ⟩ + 2 3 ∣ 1 ⟩ ∣ ϕ 2 ⟩ = 1 3 ∣ 0 ⟩ + 2 3 e 2 π i / 3 ∣ 1 ⟩ ∣ ϕ 3 ⟩ = 1 3 ∣ 0 ⟩ + 2 3 e − 2 π i / 3 ∣ 1 ⟩ \begin{aligned}
\vert\phi_0\rangle & = \vert 0 \rangle\\
\vert\phi_1\rangle & = \frac{1}{\sqrt{3}}\vert 0 \rangle + \sqrt{\frac{2}{3}} \vert 1\rangle \\
\vert\phi_2\rangle & = \frac{1}{\sqrt{3}}\vert 0 \rangle + \sqrt{\frac{2}{3}} e^{2\pi i/3} \vert 1\rangle \\
\vert\phi_3\rangle & = \frac{1}{\sqrt{3}}\vert 0 \rangle + \sqrt{\frac{2}{3}} e^{-2\pi i/3} \vert 1\rangle
\end{aligned} ∣ ϕ 0 ⟩ ∣ ϕ 1 ⟩ ∣ ϕ 2 ⟩ ∣ ϕ 3 ⟩ = ∣0 ⟩ = 3 1 ∣0 ⟩ + 3 2 ∣1 ⟩ = 3 1 ∣0 ⟩ + 3 2 e 2 πi /3 ∣1 ⟩ = 3 1 ∣0 ⟩ + 3 2 e − 2 πi /3 ∣1 ⟩ 이 네 상태는 블로흐 구에 내접하는 정사면체 의 꼭짓점이기 때문에 사면체 상태라고도 불립니다.
블로흐 구 위에서 이 네 상태의 데카르트 좌표는 다음과 같습니다.
( 0 , 0 , 1 ) , ( 2 2 3 , 0 , − 1 3 ) , ( − 2 3 , 2 3 , − 1 3 ) , ( − 2 3 , − 2 3 , − 1 3 ) , (0,0,1),\\[2mm]
\left( \frac{2\sqrt{2}}{3} , 0 , -\frac{1}{3} \right),\\[1mm]
\left( -\frac{\sqrt{2}}{3} , \sqrt{\frac{2}{3}} , -\frac{1}{3} \right),\\[1mm]
\left( -\frac{\sqrt{2}}{3} , -\sqrt{\frac{2}{3}} , -\frac{1}{3} \right), ( 0 , 0 , 1 ) , ( 3 2 2 , 0 , − 3 1 ) , ( − 3 2 , 3 2 , − 3 1 ) , ( − 3 2 , − 3 2 , − 3 1 ) , 이는 이 상태들의 밀도 행렬 표현을 파울리 행렬의 선형 결합으로 나타내어 검증할 수 있습니다.
∣ ϕ 0 ⟩ ⟨ ϕ 0 ∣ = ( 1 0 0 0 ) = I + σ z 2 \vert \phi_0 \rangle\langle \phi_0 \vert =
\begin{pmatrix}
1 & 0\\[1mm] 0 & 0
\end{pmatrix}
= \frac{\mathbb{I} + \sigma_z}{2} ∣ ϕ 0 ⟩ ⟨ ϕ 0 ∣ = ( 1 0 0 0 ) = 2 I + σ z ∣ ϕ 1 ⟩ ⟨ ϕ 1 ∣ = ( 1 3 2 3 2 3 2 3 ) = I + 2 2 3 σ x − 1 3 σ z 2 \vert \phi_1 \rangle\langle \phi_1 \vert =
\begin{pmatrix}
\frac{1}{3} & \frac{\sqrt{2}}{3} \\[2mm]
\frac{\sqrt{2}}{3} & \frac{2}{3}
\end{pmatrix}
= \frac{\mathbb{I} + \frac{2\sqrt{2}}{3} \sigma_x - \frac{1}{3}\sigma_z}{2} ∣ ϕ 1 ⟩ ⟨ ϕ 1 ∣ = 3 1 3 2 3 2 3 2 = 2 I + 3 2 2 σ x − 3 1 σ z ∣ ϕ 2 ⟩ ⟨ ϕ 2 ∣ = ( 1 3 − 1 3 2 − i 6 − 1 3 2 + i 6 2 3 ) = I − 2 3 σ x + 2 3 σ y − 1 3 σ z 2 \vert \phi_2 \rangle\langle \phi_2 \vert =
\begin{pmatrix}
\frac{1}{3} & -\frac{1}{3\sqrt{2}} - \frac{i}{\sqrt{6}} \\[2mm]
-\frac{1}{3\sqrt{2}} + \frac{i}{\sqrt{6}} & \frac{2}{3}
\end{pmatrix}
= \frac{\mathbb{I} - \frac{\sqrt{2}}{3} \sigma_x + \sqrt{\frac{2}{3}} \sigma_y - \frac{1}{3}\sigma_z}{2} ∣ ϕ 2 ⟩ ⟨ ϕ 2 ∣ = ( 3 1 − 3 2 1 + 6 i − 3 2 1 − 6 i 3 2 ) = 2 I − 3 2 σ x + 3 2 σ y − 3 1 σ z ∣ ϕ 3 ⟩ ⟨ ϕ 3 ∣ = ( 1 3 − 1 3 2 + i 6 − 1 3 2 − i 6 2 3 ) = I − 2 3 σ x − 2 3 σ y − 1 3 σ z 2 \vert \phi_3 \rangle\langle \phi_3 \vert =
\begin{pmatrix}
\frac{1}{3} & -\frac{1}{3\sqrt{2}} + \frac{i}{\sqrt{6}} \\[2mm]
-\frac{1}{3\sqrt{2}} - \frac{i}{\sqrt{6}} & \frac{2}{3}
\end{pmatrix}
= \frac{\mathbb{I} - \frac{\sqrt{2}}{3} \sigma_x - \sqrt{\frac{2}{3}} \sigma_y - \frac{1}{3}\sigma_z}{2} ∣ ϕ 3 ⟩ ⟨ ϕ 3 ∣ = ( 3 1 − 3 2 1 − 6 i − 3 2 1 + 6 i 3 2 ) = 2 I − 3 2 σ x − 3 2 σ y − 3 1 σ z 이 네 상태는 블로흐 구 위에 고르게 분포되어 있어, 각각이 나머지 셋으로부터 같은 거리에 있고 임의의 두 상태 사이의 각도가 항상 같습니다.
이제 각 a = 0 , … , 3 a=0,\ldots,3 a = 0 , … , 3 P a P_a P a { P 0 , P 1 , P 2 , P 3 } \{P_0,P_1,P_2,P_3\} { P 0 , P 1 , P 2 , P 3 }
P a = ∣ ϕ a ⟩ ⟨ ϕ a ∣ 2 P_a = \frac{\vert\phi_a\rangle\langle\phi_a\vert}{2} P a = 2 ∣ ϕ a ⟩ ⟨ ϕ a ∣ 이것이 유효한 측정임을 다음과 같이 검증할 수 있습니다.
각 P a P_a P a 1 / 2 1/2 1/2
이 행렬들의 합은 항등 행렬입니다: P 0 + P 1 + P 2 + P 3 = I . P_0 + P_1 + P_2 + P_3 = \mathbb{I}. P 0 + P 1 + P 2 + P 3 = I .
채널로서의 측정
측정을 수학적으로 기술하는 두 번째 방법은 채널로 표현하는 것입니다.
고전 정보는 양자 정보의 특수한 경우로 볼 수 있습니다. 확률적 상태를 대각 밀도 행렬과 동일시할 수 있기 때문입니다.
따라서 연산적 관점에서 측정은 측정 대상 시스템의 상태를 기술하는 행렬을 입력으로 받아 측정 결과의 분포를 기술하는 대각 밀도 행렬을 출력하는 채널로 생각할 수 있습니다.
이러한 성질을 갖는 채널은 언제나 양의 반정치 행렬들의 모음으로서의 측정 기술과 직접적으로 연결되는 단순한 표준 형태로 쓸 수 있음을 곧 살펴볼 것입니다.
역으로, 행렬들의 모음으로 주어진 임의의 측정에 대해서도, 앞 단락에서 제안한 것처럼 해당 측정을 기술하는 대각 출력 성질을 갖는 유효한 채널이 항상 존재합니다.
이 두 관찰을 종합하면, 일반 측정에 대한 두 기술 방식이 동치임을 알 수 있습니다.
더 나아가기 전에, 측정과 그것을 채널로 보는 방식, 그리고 우리가 취하는 가정들을 보다 정확히 정의해 봅시다.
앞에서와 마찬가지로, X \mathsf{X} X m m m 0 , … , m − 1 0,\ldots,m-1 0 , … , m − 1 Y \mathsf{Y} Y { 0 , … , m − 1 } \{0,\ldots,m-1\} { 0 , … , m − 1 } X \mathsf{X} X Y \mathsf{Y} Y Φ \Phi Φ Y \mathsf{Y} Y 고전적 이라는 것, 즉 X \mathsf{X} X Y \mathsf{Y} Y
Φ \Phi Φ Y \mathsf{Y} Y Δ m \Delta_m Δ m
Δ m ( σ ) = ∑ a = 0 m − 1 ⟨ a ∣ σ ∣ a ⟩ ∣ a ⟩ ⟨ a ∣ \Delta_m(\sigma) = \sum_{a = 0}^{m-1} \langle a \vert \sigma \vert a\rangle \,\vert a\rangle\langle a\vert Δ m ( σ ) = a = 0 ∑ m − 1 ⟨ a ∣ σ ∣ a ⟩ ∣ a ⟩ ⟨ a ∣ 이 채널은 이전 단원에서 다룬 완전 위상 제거 qubit 채널 Δ \Delta Δ
이제 주어진 밀도 행렬 σ \sigma σ σ = Δ m ( σ ) \sigma = \Delta_m(\sigma) σ = Δ m ( σ ) Φ \Phi Φ Y \mathsf{Y} Y
Φ ( ρ ) = Δ m ( Φ ( ρ ) ) \Phi(\rho) = \Delta_m(\Phi(\rho)) Φ ( ρ ) = Δ m ( Φ ( ρ )) 가 X \mathsf{X} X ρ \rho ρ
채널에서 행렬로
X \mathsf{X} X Y \mathsf{Y} Y
Φ ( ρ ) = Δ m ( Φ ( ρ ) ) \Phi(\rho) = \Delta_m(\Phi(\rho)) Φ ( ρ ) = Δ m ( Φ ( ρ )) 를 모든 밀도 행렬 ρ \rho ρ
Φ ( ρ ) = ∑ a = 0 m − 1 ⟨ a ∣ Φ ( ρ ) ∣ a ⟩ ∣ a ⟩ ⟨ a ∣ (1) \Phi(\rho) =
\sum_{a = 0}^{m-1} \langle a \vert \Phi(\rho) \vert a\rangle\, \vert a\rangle\langle a \vert
\tag{1} Φ ( ρ ) = a = 0 ∑ m − 1 ⟨ a ∣Φ ( ρ ) ∣ a ⟩ ∣ a ⟩ ⟨ a ∣ ( 1 ) 모든 채널과 마찬가지로, Kraus 행렬 A 0 , … , A N − 1 A_0,\ldots,A_{N-1} A 0 , … , A N − 1 Φ \Phi Φ
Φ ( ρ ) = ∑ k = 0 N − 1 A k ρ A k † \Phi(\rho) = \sum_{k = 0}^{N-1} A_k \rho A_k^{\dagger} Φ ( ρ ) = k = 0 ∑ N − 1 A k ρ A k † 이를 통해 Φ ( ρ ) \Phi(\rho) Φ ( ρ )
⟨ a ∣ Φ ( ρ ) ∣ a ⟩ = ∑ k = 0 N − 1 ⟨ a ∣ A k ρ A k † ∣ a ⟩ = ∑ k = 0 N − 1 Tr ( A k † ∣ a ⟩ ⟨ a ∣ A k ρ ) = Tr ( P a ρ ) \begin{aligned}
\langle a \vert \Phi(\rho) \vert a\rangle
& = \sum_{k = 0}^{N-1} \langle a \vert A_k \rho A_k^{\dagger} \vert a\rangle \\
& = \sum_{k = 0}^{N-1} \operatorname{Tr}\bigl( A_k^{\dagger} \vert a\rangle\langle a \vert A_k \rho\bigr)\\
& = \operatorname{Tr}\bigl(P_a\rho\bigr)
\end{aligned} ⟨ a ∣Φ ( ρ ) ∣ a ⟩ = k = 0 ∑ N − 1 ⟨ a ∣ A k ρ A k † ∣ a ⟩ = k = 0 ∑ N − 1 Tr ( A k † ∣ a ⟩ ⟨ a ∣ A k ρ ) = Tr ( P a ρ ) 여기서
P a = ∑ k = 0 N − 1 A k † ∣ a ⟩ ⟨ a ∣ A k . P_a = \sum_{k = 0}^{N-1} A_k^{\dagger} \vert a\rangle\langle a \vert A_k. P a = k = 0 ∑ N − 1 A k † ∣ a ⟩ ⟨ a ∣ A k . 따라서 이 행렬들 P 0 , … , P m − 1 P_0,\ldots,P_{m-1} P 0 , … , P m − 1 Φ \Phi Φ
Φ ( ρ ) = ∑ a = 0 m − 1 Tr ( P a ρ ) ∣ a ⟩ ⟨ a ∣ \Phi(\rho) = \sum_{a = 0}^{m-1} \operatorname{Tr}(P_a \rho) \vert a\rangle\langle a\vert Φ ( ρ ) = a = 0 ∑ m − 1 Tr ( P a ρ ) ∣ a ⟩ ⟨ a ∣ 이 표현은 행렬들의 모음으로서의 일반 측정 기술과 일치하며, 각 측정 결과가 확률 Tr ( P a ρ ) \operatorname{Tr}(P_a \rho) Tr ( P a ρ )
이제 일반 측정을 기술하기 위해 행렬들의 모음 { P 0 , … , P m − 1 } \{P_0,\ldots,P_{m-1}\} { P 0 , … , P m − 1 } X \mathsf{X} X ∣ ψ ⟩ \vert \psi\rangle ∣ ψ ⟩
⟨ ψ ∣ P a ∣ ψ ⟩ = ∑ k = 0 N − 1 ⟨ ψ ∣ A k † ∣ a ⟩ ⟨ a ∣ A k ∣ ψ ⟩ = ∑ k = 0 N − 1 ∣ ⟨ a ∣ A k ∣ ψ ⟩ ∣ 2 ≥ 0. \langle \psi \vert P_a \vert \psi\rangle
= \sum_{k = 0}^{N-1} \langle \psi \vert A_k^{\dagger} \vert a\rangle\langle a \vert A_k\vert \psi\rangle
= \sum_{k = 0}^{N-1} \bigl\vert\langle a \vert A_k\vert \psi\rangle\bigr\vert^2 \geq 0. ⟨ ψ ∣ P a ∣ ψ ⟩ = k = 0 ∑ N − 1 ⟨ ψ ∣ A k † ∣ a ⟩ ⟨ a ∣ A k ∣ ψ ⟩ = k = 0 ∑ N − 1 ⟨ a ∣ A k ∣ ψ ⟩ 2 ≥ 0. 두 번째 성질은 이 행렬들을 모두 더하면 항등 행렬이 된다는 것입니다.
∑ a = 0 m − 1 P a = ∑ a = 0 m − 1 ∑ k = 0 N − 1 A k † ∣ a ⟩ ⟨ a ∣ A k = ∑ k = 0 N − 1 A k † ( ∑ a = 0 m − 1 ∣ a ⟩ ⟨ a ∣ ) A k = ∑ k = 0 N − 1 A k † A k = I X \begin{aligned}
\sum_{a = 0}^{m-1} P_a
& = \sum_{a = 0}^{m-1} \sum_{k = 0}^{N-1} A_k^{\dagger} \vert a\rangle\langle a \vert A_k \\
& = \sum_{k = 0}^{N-1} A_k^{\dagger} \Biggl(\sum_{a = 0}^{m-1} \vert a\rangle\langle a \vert\Biggr) A_k \\
& = \sum_{k = 0}^{N-1} A_k^{\dagger} A_k \\
& = \mathbb{I}_{\mathsf{X}}
\end{aligned} a = 0 ∑ m − 1 P a = a = 0 ∑ m − 1 k = 0 ∑ N − 1 A k † ∣ a ⟩ ⟨ a ∣ A k = k = 0 ∑ N − 1 A k † ( a = 0 ∑ m − 1 ∣ a ⟩ ⟨ a ∣ ) A k = k = 0 ∑ N − 1 A k † A k = I X 마지막 등식은 Φ \Phi Φ
행렬에서 채널로
이제 P 0 + ⋯ + P m − 1 = I X P_0 + \cdots + P_{m-1} = \mathbb{I}_{\mathsf{X}} P 0 + ⋯ + P m − 1 = I X { P 0 , … , P m − 1 } \{P_0,\ldots,P_{m-1}\} { P 0 , … , P m − 1 }
Φ ( ρ ) = ∑ a = 0 m − 1 Tr ( P a ρ ) ∣ a ⟩ ⟨ a ∣ \Phi(\rho) = \sum_{a = 0}^{m-1} \operatorname{Tr}(P_a \rho) \vert a \rangle\langle a\vert Φ ( ρ ) = a = 0 ∑ m − 1 Tr ( P a ρ ) ∣ a ⟩ ⟨ a ∣ 실제로 X \mathsf{X} X Y \mathsf{Y} Y
이를 확인하는 한 가지 방법은 이 사상의 Choi 표현을 계산하는 것입니다.
J ( Φ ) = ∑ b , c = 0 n − 1 ∣ b ⟩ ⟨ c ∣ ⊗ Φ ( ∣ b ⟩ ⟨ c ∣ ) = ∑ b , c = 0 n − 1 ∑ a = 0 m − 1 ∣ b ⟩ ⟨ c ∣ ⊗ Tr ( P a ∣ b ⟩ ⟨ c ∣ ) ∣ a ⟩ ⟨ a ∣ = ∑ b , c = 0 n − 1 ∑ a = 0 m − 1 ∣ b ⟩ ⟨ b ∣ P a T ∣ c ⟩ ⟨ c ∣ ⊗ ∣ a ⟩ ⟨ a ∣ = ∑ a = 0 m − 1 P a T ⊗ ∣ a ⟩ ⟨ a ∣ \begin{aligned}
J(\Phi) & = \sum_{b,c = 0}^{n-1} \vert b \rangle \langle c \vert \otimes \Phi(\vert b \rangle \langle c \vert)\\[1mm]
& = \sum_{b,c = 0}^{n-1} \sum_{a = 0}^{m-1} \vert b \rangle \langle c \vert \otimes
\operatorname{Tr}(P_a \vert b \rangle \langle c \vert) \vert a \rangle\langle a\vert\\[1mm]
& = \sum_{b,c = 0}^{n-1} \sum_{a = 0}^{m-1} \vert b \rangle \langle b \vert P_a^T \vert c \rangle \langle c \vert \otimes
\vert a \rangle\langle a\vert\\[1mm]
& = \sum_{a = 0}^{m-1} P_a^T \otimes \vert a \rangle\langle a\vert
\end{aligned} J ( Φ ) = b , c = 0 ∑ n − 1 ∣ b ⟩ ⟨ c ∣ ⊗ Φ ( ∣ b ⟩ ⟨ c ∣ ) = b , c = 0 ∑ n − 1 a = 0 ∑ m − 1 ∣ b ⟩ ⟨ c ∣ ⊗ Tr ( P a ∣ b ⟩ ⟨ c ∣ ) ∣ a ⟩ ⟨ a ∣ = b , c = 0 ∑ n − 1 a = 0 ∑ m − 1 ∣ b ⟩ ⟨ b ∣ P a T ∣ c ⟩ ⟨ c ∣ ⊗ ∣ a ⟩ ⟨ a ∣ = a = 0 ∑ m − 1 P a T ⊗ ∣ a ⟩ ⟨ a ∣ 세 번째 등식에서 각 P a P_a P a
⟨ c ∣ P a ∣ b ⟩ = ⟨ b ∣ P a T ∣ c ⟩ \langle c \vert P_a \vert b\rangle = \langle b \vert P_a^T \vert c\rangle ⟨ c ∣ P a ∣ b ⟩ = ⟨ b ∣ P a T ∣ c ⟩ 이기 때문입니다.
이를 통해 ∣ b ⟩ ⟨ b ∣ \vert b \rangle \langle b \vert ∣ b ⟩ ⟨ b ∣ ∣ c ⟩ ⟨ c ∣ \vert c \rangle \langle c \vert ∣ c ⟩ ⟨ c ∣ b b b c c c
P 0 , … , P m − 1 P_0,\ldots,P_{m-1} P 0 , … , P m − 1 P 0 T , … , P m − 1 T P_0^{T},\ldots,P_{m-1}^{T} P 0 T , … , P m − 1 T J ( Φ ) J(\Phi) J ( Φ ) Y \mathsf{Y} Y
Tr Y ( J ( Φ ) ) = ∑ a = 0 m − 1 P a T = I X T = I X , \operatorname{Tr}_{\mathsf{Y}} (J(\Phi)) = \sum_{a = 0}^{m-1} P_a^T = \mathbb{I}_{\mathsf{X}}^T = \mathbb{I}_{\mathsf{X}}, Tr Y ( J ( Φ )) = a = 0 ∑ m − 1 P a T = I X T = I X , 이므로 Φ \Phi Φ
부분 측정
여러 시스템이 집합적으로 양자 상태에 있을 때, 그 중 하나의 시스템에 대해 일반 측정을 수행한다고 가정합시다.
이 경우 측정 결과 중 하나가 무작위로 얻어지며, 그 확률은 측정 전 시스템의 상태와 측정 방식에 따라 결정됩니다.
얻어진 측정 결과에 따라, 나머지 시스템들의 결과 상태는 일반적으로 달라집니다.
시스템 X \mathsf{X} X ( X , Z ) (\mathsf{X},\mathsf{Z}) ( X , Z ) Y \mathsf{Y} Y Z \mathsf{Z} Z
측정 전 ( X , Z ) (\mathsf{X},\mathsf{Z}) ( X , Z ) ρ \rho ρ
ρ = ∑ b , c = 0 n − 1 ∣ b ⟩ ⟨ c ∣ ⊗ ρ b , c \rho = \sum_{b,c = 0}^{n-1} \vert b\rangle\langle c\vert \otimes \rho_{b,c} ρ = b , c = 0 ∑ n − 1 ∣ b ⟩ ⟨ c ∣ ⊗ ρ b , c 이 식에서 X \mathsf{X} X 0 , … , n − 1 0,\ldots,n-1 0 , … , n − 1
측정 자체는 행렬 모음 { P 0 , … , P m − 1 } \{P_0,\ldots,P_{m-1}\} { P 0 , … , P m − 1 } X \mathsf{X} X Y \mathsf{Y} Y Φ \Phi Φ Y \mathsf{Y} Y { 0 , … , m − 1 } \{0,\ldots,m-1\} { 0 , … , m − 1 }
Φ ( ξ ) = ∑ a = 0 m − 1 Tr ( P a ξ ) ∣ a ⟩ ⟨ a ∣ \Phi(\xi) = \sum_{a = 0}^{m-1} \operatorname{Tr}(P_a \xi)\, \vert a \rangle \langle a \vert Φ ( ξ ) = a = 0 ∑ m − 1 Tr ( P a ξ ) ∣ a ⟩ ⟨ a ∣ 결과 확률
우리는 시스템 X \mathsf{X} X X \mathsf{X} X ρ X \rho_{\mathsf{X}} ρ X a ∈ { 0 , … , m − 1 } a\in\{0,\ldots,m-1\} a ∈ { 0 , … , m − 1 }
Tr ( P a ρ X ) = Tr ( P a Tr Z ( ρ ) ) = Tr ( ( P a ⊗ I Z ) ρ ) \operatorname{Tr}\bigl( P_a \rho_{\mathsf{X}}\bigr) =
\operatorname{Tr}\bigl( P_a \operatorname{Tr}_{\mathsf{Z}}(\rho)\bigr) =
\operatorname{Tr}\bigl( (P_a \otimes \mathbb{I}_{\mathsf{Z}}) \rho \bigr) Tr ( P a ρ X ) = Tr ( P a Tr Z ( ρ ) ) = Tr ( ( P a ⊗ I Z ) ρ ) 첫 번째 식은 단일 시스템 측정에 대해 이미 알고 있는 내용을 바탕으로 결과 a a a ρ X = Tr Z ( ρ ) \rho_{\mathsf{X}} = \operatorname{Tr}_{\mathsf{Z}}(\rho) ρ X = Tr Z ( ρ )
세 번째 식을 얻기 위해서는 더 많은 생각이 필요합니다. 학습자들이 스스로 이를 확인해 보시길 권장합니다.
힌트: 두 번째와 세 번째 식의 동치 관계는 ρ \rho ρ P a P_a P a ρ = M ⊗ N \rho = M\otimes N ρ = M ⊗ N
앞의 식에서 첫 번째와 세 번째 식이 동치라는 것이 바로 와닿지 않을 수도 있지만, 직관적으로는 이해가 됩니다.
X \mathsf{X} X Z \mathsf{Z} Z X \mathsf{X} X ( X , Z ) (\mathsf{X},\mathsf{Z}) ( X , Z )
{ P 0 ⊗ I Z , … , P m − 1 ⊗ I Z } . \{P_0\otimes\mathbb{I}_{\mathsf{Z}}, \ldots, P_{m-1}\otimes\mathbb{I}_{\mathsf{Z}}\}. { P 0 ⊗ I Z , … , P m − 1 ⊗ I Z } . 측정 결과에 따른 조건부 상태
서로 다른 결과의 확률뿐만 아니라, 각 측정 결과에 조건부로 주어지는 Z \mathsf{Z} Z Φ \Phi Φ X \mathsf{X} X Z \mathsf{Z} Z
( Φ ⊗ Id Z ) ( ρ ) = ∑ b , c = 0 n − 1 Φ ( ∣ b ⟩ ⟨ c ∣ ) ⊗ ρ b , c = ∑ a = 0 m − 1 ∑ b , c = 0 n − 1 Tr ( P a ∣ b ⟩ ⟨ c ∣ ) ∣ a ⟩ ⟨ a ∣ ⊗ ρ b , c = ∑ a = 0 m − 1 ∣ a ⟩ ⟨ a ∣ ⊗ ∑ b , c = 0 n − 1 Tr ( P a ∣ b ⟩ ⟨ c ∣ ) ρ b , c = ∑ a = 0 m − 1 ∣ a ⟩ ⟨ a ∣ ⊗ ∑ b , c = 0 n − 1 Tr X ( ( P a ⊗ I Z ) ( ∣ b ⟩ ⟨ c ∣ ⊗ ρ b , c ) ) = ∑ a = 0 m − 1 ∣ a ⟩ ⟨ a ∣ ⊗ Tr X ( ( P a ⊗ I Z ) ρ ) \begin{aligned}
(\Phi\otimes\operatorname{Id}_{\mathsf{Z}})(\rho)
& = \sum_{b,c = 0}^{n-1} \Phi(\vert b\rangle\langle c\vert) \otimes \rho_{b,c}\\
& = \sum_{a = 0}^{m-1} \sum_{b,c = 0}^{n-1} \operatorname{Tr}(P_a \vert b\rangle\langle c\vert)
\,\vert a\rangle \langle a \vert \otimes \rho_{b,c}\\
& = \sum_{a = 0}^{m-1} \vert a\rangle \langle a \vert \otimes \sum_{b,c = 0}^{n-1}
\operatorname{Tr}(P_a \vert b\rangle\langle c\vert) \rho_{b,c}\\
& = \sum_{a = 0}^{m-1} \vert a\rangle \langle a \vert \otimes
\sum_{b,c = 0}^{n-1} \operatorname{Tr}_{\mathsf{X}}\bigl((P_a\otimes\mathbb{I}_{\mathsf{Z}})
(\vert b\rangle\langle c\vert\otimes\rho_{b,c})\bigr)\\
& = \sum_{a = 0}^{m-1} \vert a\rangle \langle a \vert \otimes
\operatorname{Tr}_{\mathsf{X}}\bigl((P_a \otimes \mathbb{I}_{\mathsf{Z}}) \rho\bigr)
\end{aligned} ( Φ ⊗ Id Z ) ( ρ ) = b , c = 0 ∑ n − 1 Φ ( ∣ b ⟩ ⟨ c ∣ ) ⊗ ρ b , c = a = 0 ∑ m − 1 b , c = 0 ∑ n − 1 Tr ( P a ∣ b ⟩ ⟨ c ∣ ) ∣ a ⟩ ⟨ a ∣ ⊗ ρ b , c = a = 0 ∑ m − 1 ∣ a ⟩ ⟨ a ∣ ⊗ b , c = 0 ∑ n − 1 Tr ( P a ∣ b ⟩ ⟨ c ∣ ) ρ b , c = a = 0 ∑ m − 1 ∣ a ⟩ ⟨ a ∣ ⊗ b , c = 0 ∑ n − 1 Tr X ( ( P a ⊗ I Z ) ( ∣ b ⟩ ⟨ c ∣ ⊗ ρ b , c ) ) = a = 0 ∑ m − 1 ∣ a ⟩ ⟨ a ∣ ⊗ Tr X ( ( P a ⊗ I Z ) ρ ) 이것이 밀도 행렬인 것은 Φ \Phi Φ Tr X ( ( P a ⊗ I Z ) ρ ) \operatorname{Tr}_{\mathsf{X}}\bigl((P_a \otimes \mathbb{I}_{\mathsf{Z}}) \rho) Tr X ( ( P a ⊗ I Z ) ρ )
마지막 한 단계를 더 거치면 우리가 찾고 있는 것을 드러내는 식으로 변환됩니다.
∑ a = 0 m − 1 Tr ( ( P a ⊗ I Z ) ρ ) ∣ a ⟩ ⟨ a ∣ ⊗ Tr X ( ( P a ⊗ I Z ) ρ ) Tr ( ( P a ⊗ I Z ) ρ ) \sum_{a = 0}^{m-1} \operatorname{Tr}\bigl((P_a \otimes \mathbb{I}_{\mathsf{Z}}) \rho)\,
\vert a\rangle \langle a \vert \otimes \frac{\operatorname{Tr}_{\mathsf{X}}\bigl((P_a \otimes \mathbb{I}_{\mathsf{Z}}) \rho)}{\operatorname{Tr}\bigl((P_a \otimes \mathbb{I}_{\mathsf{Z}}) \rho)} a = 0 ∑ m − 1 Tr ( ( P a ⊗ I Z ) ρ ) ∣ a ⟩ ⟨ a ∣ ⊗ Tr ( ( P a ⊗ I Z ) ρ ) Tr X ( ( P a ⊗ I Z ) ρ ) 이것은 *고전-양자 상태(classical-quantum state)*의 예로,
∑ a = 0 m − 1 p ( a ) ∣ a ⟩ ⟨ a ∣ ⊗ σ a , \sum_{a = 0}^{m-1} p(a)\, \vert a\rangle\langle a\vert \otimes \sigma_a, a = 0 ∑ m − 1 p ( a ) ∣ a ⟩ ⟨ a ∣ ⊗ σ a , 밀도 행렬 강의에서 보았던 것과 같습니다.
각 측정 결과 a ∈ { 0 , … , m − 1 } a\in\{0,\ldots,m-1\} a ∈ { 0 , … , m − 1 }
p ( a ) = Tr ( ( P a ⊗ I Z ) ρ ) p(a) = \operatorname{Tr}\bigl((P_a \otimes \mathbb{I}_{\mathsf{Z}}) \rho) p ( a ) = Tr ( ( P a ⊗ I Z ) ρ ) 로 Y \mathsf{Y} Y ∣ a ⟩ ⟨ a ∣ \vert a \rangle \langle a \vert ∣ a ⟩ ⟨ a ∣ Z \mathsf{Z} Z
σ a = Tr X ( ( P a ⊗ I Z ) ρ ) Tr ( ( P a ⊗ I Z ) ρ ) . (2) \sigma_a = \frac{\operatorname{Tr}_{\mathsf{X}}\bigl((P_a \otimes \mathbb{I}_{\mathsf{Z}}) \rho)}{\operatorname{Tr}\bigl((P_a \otimes \mathbb{I}_{\mathsf{Z}}) \rho)}.
\tag{2} σ a = Tr ( ( P a ⊗ I Z ) ρ ) Tr X ( ( P a ⊗ I Z ) ρ ) . ( 2 ) 즉, 이것은
Tr X ( ( P a ⊗ I Z ) ρ ) \operatorname{Tr}_{\mathsf{X}}\bigl((P_a \otimes \mathbb{I}_{\mathsf{Z}}) \rho) Tr X ( ( P a ⊗ I Z ) ρ ) 를 그 대각합(trace)으로 나누어 정규화함으로써 얻어지는 밀도 행렬입니다.
(엄밀히 말하면, 상태 σ a \sigma_a σ a p ( a ) p(a) p ( a ) p ( a ) = 0 p(a) = 0 p ( a ) = 0
당연하게도, 결과 확률은 이전 관찰과 일치합니다.
요약하면, ( X , Z ) (\mathsf{X},\mathsf{Z}) ( X , Z ) ρ \rho ρ X \mathsf{X} X { P 0 , … , P m − 1 } \{P_0,\ldots,P_{m-1}\} { P 0 , … , P m − 1 }
각 결과 a a a p ( a ) = Tr ( ( P a ⊗ I Z ) ρ ) p(a) = \operatorname{Tr}\bigl((P_a \otimes \mathbb{I}_{\mathsf{Z}}) \rho) p ( a ) = Tr ( ( P a ⊗ I Z ) ρ )
결과 a a a Z \mathsf{Z} Z ( 2 ) (2) ( 2 ) σ a \sigma_a σ a Tr X ( ( P a ⊗ I Z ) ρ ) \operatorname{Tr}_{\mathsf{X}}\bigl((P_a \otimes \mathbb{I}_{\mathsf{Z}}) \rho) Tr X ( ( P a ⊗ I Z ) ρ )
일반화
이 설명을 시스템의 순서가 바뀌거나 세 개 이상의 시스템이 있는 경우와 같은 다른 상황에도 적용할 수 있습니다.
개념적으로는 간단하지만, 수식으로 표현하면 복잡해질 수 있습니다.
일반적으로, r r r X 1 , … , X r \mathsf{X}_1,\ldots,\mathsf{X}_r X 1 , … , X r ( X 1 , … , X r ) (\mathsf{X}_1,\ldots,\mathsf{X}_r) ( X 1 , … , X r ) ρ \rho ρ X k \mathsf{X}_k X k { P 0 , … , P m − 1 } \{P_0,\ldots,P_{m-1}\} { P 0 , … , P m − 1 }
각 결과 a a a
p ( a ) = Tr ( ( I X 1 ⊗ ⋯ ⊗ I X k − 1 ⊗ P a ⊗ I X k + 1 ⊗ ⋯ ⊗ I X r ) ρ ) . p(a) = \operatorname{Tr}\bigl((\mathbb{I}_{\mathsf{X}_1}\otimes \cdots \otimes\mathbb{I}_{\mathsf{X}_{k-1}} \otimes P_a \otimes \mathbb{I}_{\mathsf{X}_{k+1}} \otimes \cdots \otimes\mathbb{I}_{\mathsf{X}_r}) \rho\bigr). p ( a ) = Tr ( ( I X 1 ⊗ ⋯ ⊗ I X k − 1 ⊗ P a ⊗ I X k + 1 ⊗ ⋯ ⊗ I X r ) ρ ) .
결과 a a a ( X 1 , … , X k − 1 , X k + 1 , … , X r ) (\mathsf{X}_1,\ldots,\mathsf{X}_{k-1},\mathsf{X}_{k+1},\ldots,\mathsf{X}_r) ( X 1 , … , X k − 1 , X k + 1 , … , X r )
Tr X k ( ( I X 1 ⊗ ⋯ ⊗ I X k − 1 ⊗ P a ⊗ I X k + 1 ⊗ ⋯ ⊗ I X r ) ρ ) Tr ( ( I X 1 ⊗ ⋯ ⊗ I X k − 1 ⊗ P a ⊗ I X k + 1 ⊗ ⋯ ⊗ I X r ) ρ ) \frac{\operatorname{Tr}_{\mathsf{X}_k}\bigl((\mathbb{I}_{\mathsf{X}_1}\otimes \cdots \otimes\mathbb{I}_{\mathsf{X}_{k-1}} \otimes P_a \otimes \mathbb{I}_{\mathsf{X}_{k+1}} \otimes \cdots \otimes\mathbb{I}_{\mathsf{X}_r}) \rho\bigr)}{\operatorname{Tr}\bigl((\mathbb{I}_{\mathsf{X}_1}\otimes \cdots \otimes\mathbb{I}_{\mathsf{X}_{k-1}} \otimes P_a \otimes \mathbb{I}_{\mathsf{X}_{k+1}} \otimes \cdots \otimes\mathbb{I}_{\mathsf{X}_r}) \rho\bigr)} Tr ( ( I X 1 ⊗ ⋯ ⊗ I X k − 1 ⊗ P a ⊗ I X k + 1 ⊗ ⋯ ⊗ I X r ) ρ ) Tr X k ( ( I X 1 ⊗ ⋯ ⊗ I X k − 1 ⊗ P a ⊗ I X k + 1 ⊗ ⋯ ⊗ I X r ) ρ )